近日,中国科学院合肥物质院安光所高闽光研究员团队在道路交通污染物多任务预测领域取得了重要进展。相关研究成果“基于DSTMA-BLSTM算法的道路污染物时间序列预测与敏感性分析”发表于环境建模与软件领域国际权威期刊Environmental Modelling & Software。
城市道路交通排放是现代都市大气复合污染的重要成分,其污染物浓度的时空演化受大气气象场扰动、交通行为模式及机动车排放结构多因素驱动。该过程具有显著的非线性耦合与多尺度时变特征,使得传统的线性统计模型在多源耦合情境下难以保持稳定的泛化性能。尽管近年来机器学习和深度神经网络在空气质量预测中取得一定进展,但其模型结构通常缺乏物理可解释性,未充分考虑多污染物间的共变关系和异质动态特征,这成为限制其在复杂道路环境中应用的主要技术瓶颈。
针对上述问题,安光所研究团队设计了一种融合双向长短期记忆网络(BLSTM)结构与动态共享-任务特异多头注意力机制(DSTMA)的多任务深度学习模型,实现对多污染物时序特征的联合建模与自适应分解。该模型在结构上通过共享注意力层提取不同污染物间的共性时序模式,同时利用任务特异注意力头刻画各污染物的独立响应特征,从而实现对共享特征与差异性特征的自适应分离。基于真实道路监测数据进行的验证结果表明,该算法在NO、NO2、CO2预测中分别实现了R²=0.959、0.944、0.949(R²的值越接近1,说明回归直线对观测值的拟合程度越好)的高精度表现,相比传统LSTM模型平均误差下降约30%,R²整体提升约0.06–0.12。该研究表明,DSTMA-BLSTM算法在交通排放监测、城市空气质量预测及环境决策支持中具有广阔应用前景。
论文的通讯作者为李相贤研究员,第一作者为秦玉胜博士后。本研究获得了国家重点研发计划(2023YFC3705403)等项目的资助支持。
论文链接:https://doi.org/10.1016/j.envsoft.2025.106730
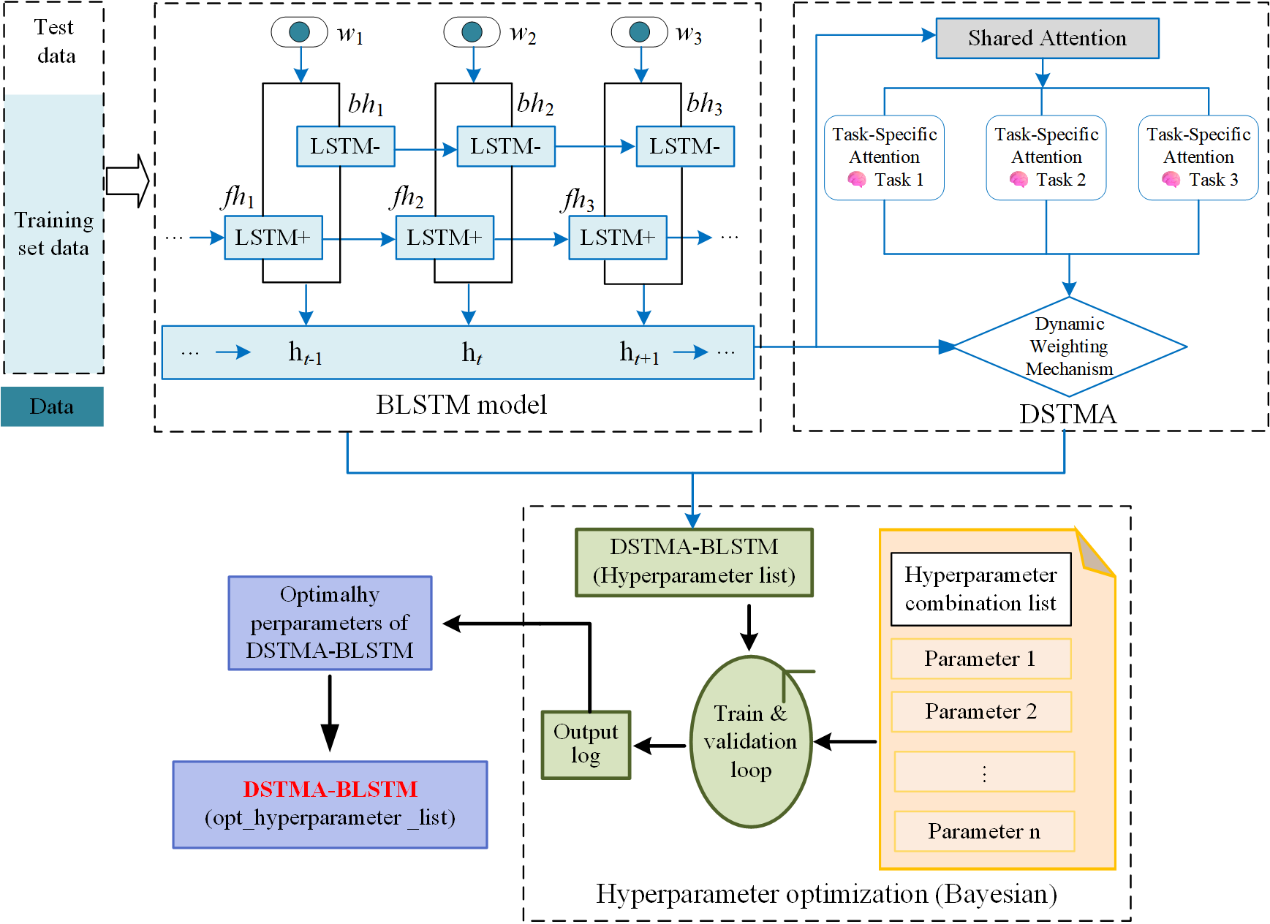
图1. 基于DSTMA-BLSTM的污染物多任务预测算法
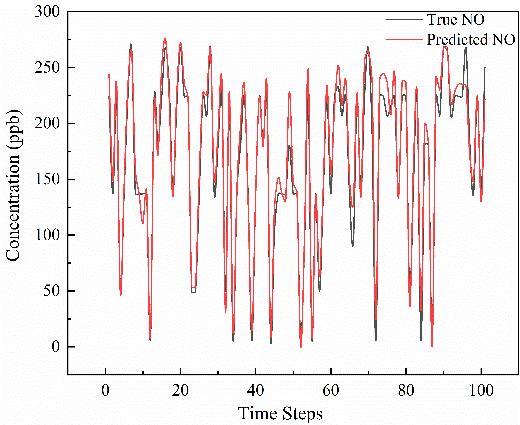
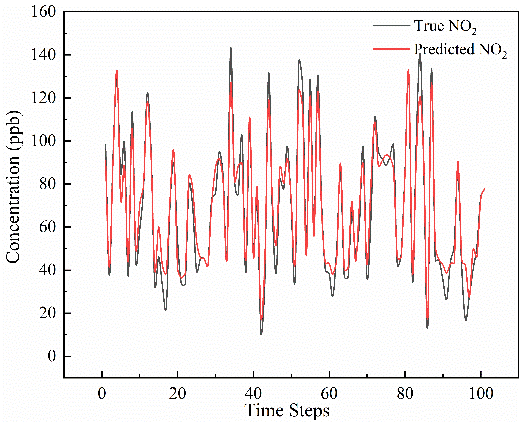
图2. NOx联合预测结果




