


先进制造领域:三栖移动机器人
三栖移动机器人
所处阶段:小试
成果来源:先进制造技术研究所
必要性及需求分析:
受运动模式的限制,目前研制出的移动机器人大多是基于单一作业环境。两栖机器人虽然一定程度上增强了只具备单一运动模式的移动机器人的环境适应性,但同样具有局限性。同样,适于空中飞行的机器人可以很好的完成空中作业,但难以适应陆地和水下作业要求。所以,变革移动机器人的机构设计和运动模式,研究开发能适应复杂的水陆空作业环境的三栖机器人,是机器人研究领域的一个新的重要研究方向。除了要求机器人具有多环境全地形适应能力外,良好的机动性、节能高效、自主等也是重要的发展趋势。
目标及主要任务:
开发出一款能在水陆空多环境全地形移动的探测机器人是目前我们遇到的难题和挑战,也正是本项研究的主要内容和创新所在。在本项研究中,我们将通过研究水母的运动机理并通过设计再现,结合创新性机构设计,开发出一款高机动性自主三栖移动机器人。本项目研究将为移动机器人的运动方式开启新的研究思路,具有很好的科学意义、重要的理论价值和实际的应用前景。如果研制成功,可用于军事侦察、核与自然灾难以及工业事故等特殊事件发生后的救援、环境监测与评估,也可用于煤矿瓦斯气体检测、空间探索与安保等等。
现有工作基础:
本项研究对三栖移动机器人开发所涉及的关键技术进行了彻底的研究,突破了轻质高刚度的机械结构设计、自主切换的控制系统设计、动力飞行系统设计等技术,开发了三栖机器人样机,申请了数项发明专利,可用于产业化。取得的突破和创新点主要有:
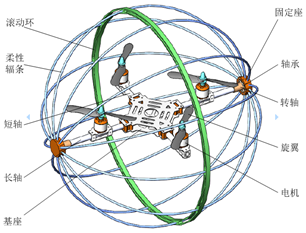
(1)通过创新机构设计,将四旋翼机构和柔性球壳机构有效耦合,实
现了将四旋翼机构作为两种运动模式的统一驱动机构,同时也实现了将柔性球壳机构分别作为两种运动模式的防护和执行机构;
(2)通过采用轻量化设计方法,即采用轻质高刚性材料及零部件结构
设计使得机器人实现了在有限的升力条件下的快速机动及有效负载能力,为机器人作为探测平台的应用奠定了基础;
(3)通过开发物理样机进行试验,改进了设计中纯球壳机构不能有效应用于地面滚动模式的不足,使该两栖机器人具备了较好的运动性能,改进了传统只具备单一运动模式的移动机器人的环境适应性。
预期经济和社会效益:
本项目开发的四旋翼机器人为四旋翼无人机产品开发打下了技术基础,在本项目成果的基础上,如果继续投入经费,可以开发出自主型无人机产品,相较目前市场上广泛存在的遥控飞行无人机而言,自主性大大提高,是真正的无人机,具有飞行范围更大、飞行更灵活可靠、安全性更高等特点,具有广阔的市场需求。
实施方式/模式:
开发产品,进行市场推广和销售。



扫一扫